
När två föremål kolliderar är resultatet rent fysiskt. Detta gäller oavsett om det är ett motorfordon som kör fort på en motorväg, en biljardboll som rullar längs ett filtbord eller en löpare som kolliderar med marken med en hastighet av 180 steg per minut.
De specifika egenskaperna hos kontakten mellan marken och löparens fötter avgör löparens löphastighet, men de flesta löpare lägger sällan tid på att studera sin "kollisionsdynamik". Löpare uppmärksammar sina veckokilometer, långdistanslöpning, löphastighet, puls, intervallträningens struktur etc., men förbiser ofta det faktum att löpförmågan beror på kvaliteten på interaktionen mellan löparen och marken, och resultaten av alla kontakter beror på vinkeln i vilken föremål kontaktar varandra. Människor förstår denna princip när de spelar biljard, men de förbiser den ofta när de springer. De brukar inte alls uppmärksamma vinklarna i vilka deras ben och fötter kommer i kontakt med marken, även om vissa vinklar är starkt relaterade till att maximera framdrivningskraften och minimera risken för skador, medan andra genererar ytterligare bromskraft och ökar risken för skador.
Människor springer i sin naturliga gång och är övertygade om att detta är det bästa löpsättet. De flesta löpare lägger inte vikt vid punkten där kraften appliceras vid kontakt med marken (om man nuddar marken med hälen, hela fotsulan eller framfoten). Även om de väljer fel kontaktpunkt som ökar bromskraften och risken för skador, genererar de fortfarande större kraft genom benen. Få löpare tar hänsyn till hårdheten på benen när de nuddar marken, även om hårdheten har en viktig inverkan på stötkraftsmönstret. Till exempel, ju större styvhet marken är, desto större kraft överförs tillbaka till löparens ben efter att ha blivit träffad. Ju större hårdhet benen är, desto större framåtriktad kraft genereras när löparen trycks mot marken.
Genom att uppmärksamma faktorer som markkontaktens vinkel, benens och fötternas kontaktpunkt och benens hårdhet blir kontaktsituationen mellan löparen och marken förutsägbar och repeterbar. Dessutom, eftersom ingen löpare (inte ens Usain Bolt) kan röra sig med ljusets hastighet, gäller Newtons rörelselagar för resultatet av kontakten oavsett löparens träningsvolym, puls eller aeroba kapacitet.
Ur ett perspektiv av stötkraft och löphastighet är Newtons tredje lag särskilt viktig: den berättar för oss. Om en löpares ben är relativt rakt när det nuddar marken och foten är framför kroppen, så kommer denna fot att nudda marken framåt och nedåt, medan marken kommer att trycka löparens ben och kropp uppåt och bakåt.
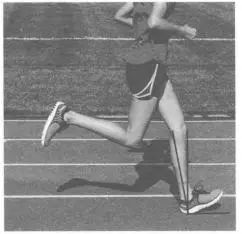
Precis som Newton sa: ”Alla krafter har reaktionskrafter av samma storlek men motsatta riktningar.” I det här fallet är reaktionskraftens riktning exakt motsatt den rörelseriktning som löparen hoppas på. Med andra ord vill löparen röra sig framåt, men kraften som bildas efter att ha kommit i kontakt med marken kommer att trycka honom uppåt och bakåt (som visas i figuren nedan).
När en löpare nuddar marken med hälen och foten är framför kroppen, är riktningen för den initiala stötkraften (och den resulterande dragkraften) uppåt och bakåt, vilket är långt ifrån löparens förväntade rörelseriktning.
När en löpare nuddar marken i fel benvinkel, säger Newtons lag att den genererade kraften inte får vara optimal, och löparen kan aldrig nå den högsta löphastigheten. Därför är det nödvändigt för löpare att lära sig att använda rätt markkontaktvinkel, vilket är en grundläggande del av ett korrekt löpmönster.
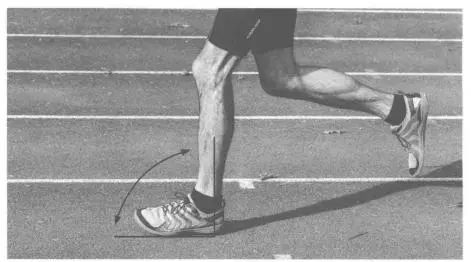
Den viktigaste vinkeln vid markkontakt kallas "tibialvinkel", vilken bestäms av graden av vinkeln som bildas mellan tibia och marken när foten först vidrör marken. Den exakta tidpunkten för att mäta tibialvinkeln är när foten först vidrör marken. För att bestämma tibiavinkeln bör en rak linje parallell med tibia dras från knäledens mitt och ner till marken. En annan linje börjar från kontaktpunkten för linjen parallell med tibia med marken och dras rakt fram längs marken. Subtrahera sedan 90 grader från denna vinkel för att få den faktiska tibialvinkeln, vilket är graden av vinkeln som bildas mellan tibia vid kontaktpunkten och den raka linjen vinkelrätt mot marken.
Om till exempel vinkeln mellan marken och skenbenet när foten först nuddar marken är 100 grader (som visas i figuren nedan), så är skenbenets faktiska vinkel 10 grader (100 grader minus 90 grader). Kom ihåg att skenbensvinkeln faktiskt är graden av vinkeln mellan en rak linje vinkelrät mot marken vid kontaktpunkten och skenbenet.
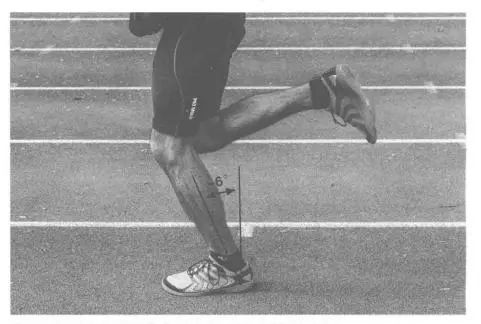
Tibiavinkeln är graden av vinkeln som bildas mellan tibia vid kontaktpunkten och den raka linjen vinkelrät mot marken. Tibiavinkeln kan vara positiv, noll eller negativ. Om tibia lutar framåt från knäleden när foten kommer i kontakt med marken, är tibiavinkeln positiv (som visas i figuren nedan).

Om skenbenet är exakt vinkelrätt mot marken när foten nuddar marken är skenbensvinkeln noll (som visas i figuren nedan).
Om skenbenet lutar framåt från knäleden när det vidrör marken är skenbensvinkeln positiv. Vid marken är skenbensvinkeln -6 grader (84 grader minus 90 grader) (som visas i figuren nedan), och löparen kan falla framåt när den vidrör marken. Om skenbenet lutar bakåt från knäleden när den vidrör marken är skenbensvinkeln negativ.
Med det sagt, har du förstått elementen i löpmönstret?
Publiceringstid: 22 april 2025